
DOBOT M1 Pro(ロボットアーム本体) [Dobot-M1-PRO]




販売価格: 会員販売価格
商品詳細
DOBOT M1 Pro(ロボットアーム本体)

DOBOT M1 Proは、低価格のスカラー型産業用ロボットアームです。
※本製品には、Suction CupやGripperなどのエンドエフェクターの付属はありません。
主な基本性能




最大の稼働範囲400mmのワークエリアで、M1の繰返しのポジションの正確性は、0.02mmに達し、
軽量の産業用ロボットアームとしては、最高のパフォーマンスを保証します。
高速なパフォーマンス

コントローラーとロボットアームの一体型設計により、プラグアンドプレイが可能で、接続や配線の設置の手間を省くことができます。
安全性と信頼性

M1 Proは、複数のプログラミングオプションで異なるデバイスのワイヤレスコントロールに対応しています。オペレーターがフリー・トゥ・ドロップ機能をオンにすると、ロボットはアームをドラッグ&ドロップで簡単に任意の位置に移動させることができます。テストにかかる時間を大幅に短縮し、プログラミングのプロセスを簡略化することができます。
スマートなエンコーダインターフェース
スマートな統合のために設計されたM1 Proのエンコーダインターフェースは、コンベアトラッキング機能をサポートし、ロボットの経路をコンベアの動きに合わせて調整することができます。M1 Proは滑らかに動き続け、例えば、糊付けのような一貫した生産を保証します。
WHAT IS DOBOT M1?
DOBOT M1は、コストパフォーマンスの高いインテリジェントなロボットアームです。高い精度、広い稼動範囲、完成された機能と追加開発で、更に多様な利用方法を提供します。
半田付け、画像認識、PCBのプラグインなど、インテリジェントな産業システムの構築を助け、DOBOT M1でマルチ機能の組立ラインの仕事を実現することができます。
専用ソフトウエアDOBOT Studioで使い方は簡単
DOBOT M1は、専用ソフトウエアのDOBOT Studioが付属されます。
DOBOT M1の操作は、ハンドティーチング、Blockly(ブロック言語)によるプログラミング、
PythonやC/C++などの一般的なプログラミング言語記述など操作方法は、
ビギナーからプロフェッショナルまで、幅広いレベルの方が利用いただけます。
専門のロボットエンジニアがいない現場でも、日常的なオペレーションは作業者だけでの対応も可能です。
❑ ハンドティーチング
❑ ブロック言語Blocklyによるプログラミング
❑ Python、C/C++などのプログラミング言語
プラグアンドプレイ、移動も簡単
DOBOT M1は、複雑なインストール作業なしに、プラグアンドプレイによりワンステップで接続できます。
本体も一人で簡単に運べるライトウエイトなので、いつでも、どこでも簡単に運べます。

統合されたマシンデザインと衝突検知・停止機能
その統合されたデザインにより、サーボドライブとコントロールシステムの間の仕事効率は劇的に改善しています。
また、M1には、衝突検知・停止機能があるので、高い安全性を確保しています。

シンプルで使いやすい洗練されたハードウエア
シンプルで簡素なメカ構造が効果的にM1を作業させ、それは様々な組立ラインの作業のためにパーフェクトなソリューションとなります。

インテリジェントで、統合されたシステムで幅広いアプリケーションに対応
標準化されたインテリジェントなインターフェースとオープンなプログラミング言語が高度に拡張性を実現しています。異なるアクセサリーを使うことで、DOBOT M1は、多様な機能を実現します。
利用例1:Micro SDカードのピックアンドプレイス
Micro SDカードをトレーからピッキングし、作業用のストッカーに移設する作業です。
利用例2:PLC Control DOBOT M1 利用例3:Rasbperry pi 3 B+との実験デモ
利用例4:M1とビジョンシステム(画像認識) 利用例5:Vision Kitを用いた整列デモ
作業の効率化を支援
軽量の本体、簡単な設置、多様な制御方法で、DOBOT M1は、生産やパッキングなどを含む作業を短期間立ち上げることを支援します。

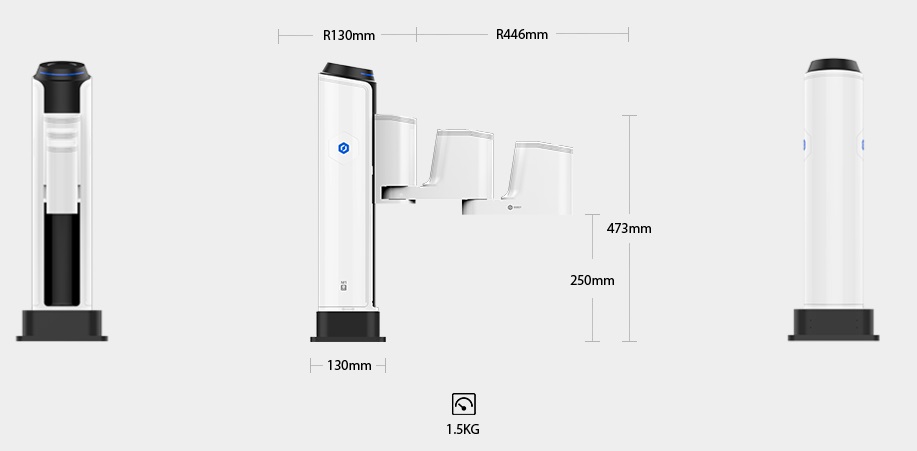
ロボットアームサイズ
主要な仕様
| 仕様 | M1 Pro | |
|---|---|---|
| 重量 (kg) | 15.7 | |
| 可搬重量 (kg) | 1.5 | |
| リーチ (mm) | 400 | |
| 繰り返し精度 (mm) | ±0.02 | |
| 電源 | 100~240VAC, 50/60Hz | |
| 通信プロトコル | TCP/IP, Modbus TCP, Modbus RTU | |
| 関節可動域 | J1 | ±85° |
| J2 | ±130° | |
| J3 | 5mm ~ 245mm | |
| J4 | ±360° | |
| 関節最大速度 | J1 | 180° /s |
| J2 | 180° /s | |
| J3 | 1000mm/s | |
| J4 | 1000° /s | |
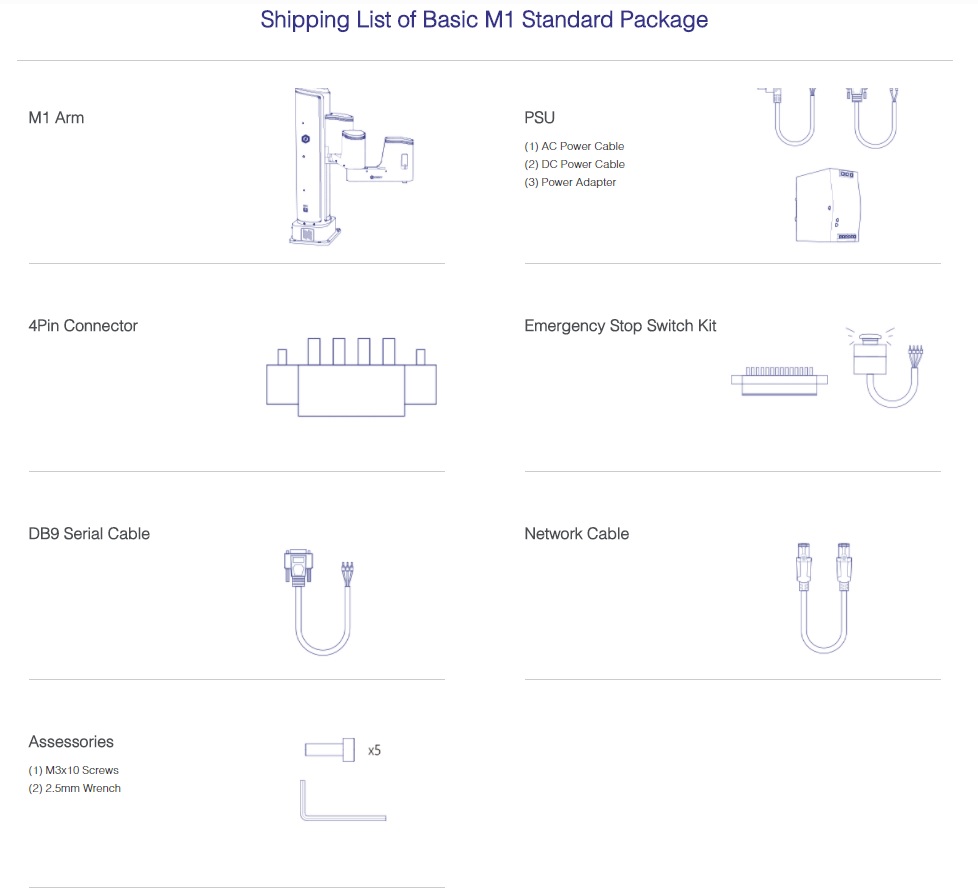
DOBOT M1 (ロボットアーム本体)の内容物
ご不明な点は弊社までお気軽にお問合せ下さい。
TechShare株式会社 営業部
DOBOT担当
TEL 03-5683-7293
Email:dobot@techshare.co.jp